 Get in touch
Get in touch

1. Введение: деконструкция мощности асинхронного двигателя переменного тока. Асинхронный двигатель переменного тока является одним из м...
ЧИТАТЬ ДАЛЬШЕНовости отрасли
2026-04-21
Двигатель постоянного тока (постоянного тока) преобразует электрическую энергию в механическое вращение, используя взаимодействие между магнитным полем и проводником с током. Принцип действия вытекает из закона силы Лоренца: когда электрический ток протекает через проводник, находящийся внутри магнитного поля, на проводник действует сила, перпендикулярная как направлению тока, так и направлению поля. Расположите достаточное количество проводников с током во вращающемся узле, и эта сила превратится в непрерывный вращающий момент.
На практике двигатель постоянного тока содержит две основные магнитные системы. статор обеспечивает стационарное магнитное поле — либо от постоянных магнитов, либо от электромагнитов (обмоток возбуждения). ротор (также называемый якорем) несет проводники, подключенные к внешнему источнику питания постоянного тока. Ток, протекающий через проводники ротора, реагирует с полем статора, создавая крутящий момент, вращающий ротор. Пока подается напряжение постоянного тока, двигатель продолжает вращаться.
Скорость двигателя постоянного тока в первую очередь контролируется приложенным напряжением: более высокое напряжение приводит к более быстрому вращению. Выходной крутящий момент пропорционален току якоря. Эта прямая зависимость между напряжением, током, скоростью и крутящим моментом делает двигатели постоянного тока исключительно простыми в управлении в широком рабочем диапазоне — свойство, которое объясняет их продолжающееся доминирование в приводах с регулируемой скоростью.
Внутренняя архитектура двигателя постоянного тока варьируется в зависимости от конструкции с щеткой и без щетки, но некоторые основные компоненты являются общими для обоих типов.
Статор — это стационарный внешний узел двигателя. В двигателях постоянного тока малой мощности и малой мощности поле статора создается постоянными магнитами, прикрепленными к внутреннему отверстию корпуса двигателя. В более крупных промышленных двигателях постоянного тока статор несет обмотки возбуждения — катушки проволоки, намотанные вокруг полюсных наконечников, — через которые протекает отдельный ток возбуждения постоянного тока для создания магнитного поля. Корпус статора обычно изготавливается из ламинированной кремниевой стали, чтобы минимизировать потери на вихревые токи.
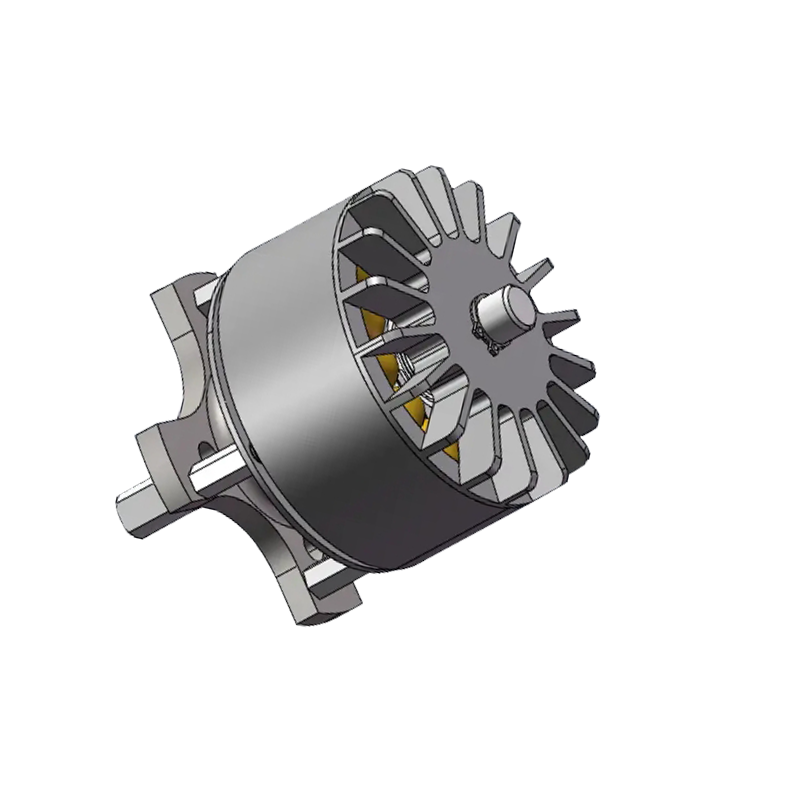
Ротор представляет собой вращающийся узел, установленный на валу двигателя. Он состоит из пластинчатого железного сердечника с выточенными по его окружности пазами, в которые наматываются обмотки якоря. Ламинированная конструкция снижает потери на вихревые токи в утюге. В коллекторных двигателях постоянного тока ротор несет намотанные катушки; в бесщеточных двигателях постоянного тока вместо этого на роторе установлены постоянные магниты.
Коммутатор представляет собой сегментированное медное кольцо, закрепленное на валу ротора. Каждый сегмент подключается к отдельной катушке якоря. Угольные щетки — подпружиненные контакты, установленные в корпусе статора — прижимаются к поверхности коллектора и поддерживают электрический контакт при вращении вала. Когда ротор вращается, сегменты коллектора последовательно проходят под щетками, автоматически переключая направление тока в каждой катушке в нужный момент, чтобы поддерживать крутящий момент, действующий в постоянном направлении вращения. Это механическое переключение и определяет коллекторный двигатель постоянного тока.
Обмотки якоря представляют собой изолированные медные проводники, намотанные в пазы ротора. Конфигурация обмотки — коленчатая, волновая или симплексная — определяет количество параллельных путей тока через якорь и влияет на скоростно-моментные характеристики двигателя. Обмотки возбуждения на статоре, если они имеются, наматываются так, чтобы обеспечить количество магнитных полюсов, необходимое для расчетного диапазона скорости и крутящего момента.
Выходной вал передает механический крутящий момент на нагрузку. Прецизионные шарикоподшипники или подшипники скольжения поддерживают вал на каждом конце корпуса, поддерживая воздушный зазор между ротором и статором в пределах жестких допусков. Корпус (торцевые колокола и рама) обеспечивает структурную поддержку, защищает внутренние компоненты, а в некоторых конструкциях включает охлаждающие ребра или приспособления для крепления внешнего вентилятора.
В щеточном двигателе постоянного тока коллектор и щетки выполняют функцию переключения тока механически. Когда якорь вращается, сегменты коллектора проходят мимо неподвижных щеточных контактов, последовательно подключая каждую катушку якоря к источнику питания. Это гарантирует, что независимо от положения ротора катушка, в данный момент совмещенная с зазором между полюсами статора, всегда проводит ток в правильном направлении, создавая прямой крутящий момент.
В результате получается двигатель, который работает напрямую от источника постоянного тока без необходимости внешней электронной коммутации. Подключите коллекторный двигатель постоянного тока к аккумулятору или регулируемому источнику постоянного тока, и он немедленно начнет вращаться. Поменяйте полярность, и направление изменится. Эта простота является основной причиной того, что коллекторные двигатели по-прежнему широко используются в экономичных приложениях с низкой и средней сложностью.
Механический контакт между щетками и коллектором представляет собой ключевые ограничения двигателя. Трение щетки-коллектора приводит к образованию тепла и частиц износа, а искрение, возникающее при переключении сегментов, создает электромагнитные помехи (ЭМП). Замена щеток обычно требуется каждые 1000–5000 часов работы. в зависимости от текущей нагрузки, скорости и условий эксплуатации. Поверхность коллектора также требует периодического осмотра и ремонта.
Коллекторные двигатели постоянного тока не подходят для использования в огнеопасных или взрывоопасных средах, поскольку искрение на щетках может воспламенить окружающие газы. Их максимальная скорость также ограничена механическими ограничениями контакта щетки с коммутатором, обычно достигая максимума при 3000–8000 об/мин в большинстве конструкций.

Бесщеточный двигатель постоянного тока (BLDC) полностью исключает коллектор и щеточный узел за счет перемещения постоянных магнитов на ротор, а обмоток — на статор. Переключение тока — коммутация — осуществляется электронным способом с помощью контроллера двигателя, который контролирует положение ротора с помощью датчиков Холла или обнаружения обратной ЭДС и подает питание на катушки статора в правильной последовательности для поддержания вращения.
Эта архитектурная инверсия имеет значительные последствия для производительности, обслуживания и диапазона приложений.
| Характеристика | Матовый двигатель постоянного тока | Бесщеточный двигатель постоянного тока |
|---|---|---|
| Метод коммутации | Механический (щетки коллекторные) | Электронный (датчики контроллера) |
| Эффективность | 75–85% | 85–95% |
| Техническое обслуживание | Требуется регулярная замена щеток | Минимальный — только подшипники |
| Диапазон скоростей | Типично до ~8000 об/мин | Возможна скорость до 100 000 об/мин. |
| ЭМП/дуга | Значительное искрение щеток | Низкий (нет контакта с щеткой) |
| Пригодность для опасной среды | Не подходит (дуга щетки) | Подходит (без искрения) |
| Требования к контроллеру | Простое управление напряжением постоянного тока | Требуется специальный электронный контроллер |
| Стоимость единицы | Нижний | Высшее (контроллер двигателя) |
| Продолжительность жизни | Ограничено износом щеток. | Длиннее — нет изнашиваемых контактных частей |
Преимущество бесщеточных двигателей в эффективности особенно важно в приложениях с батарейным питанием. Трансмиссия электромобиля или электроинструмент, работающий на двигателе BLDC с КПД 92 % по сравнению с щеточным эквивалентом с КПД 80 %, напрямую приводит к увеличению времени работы на одной зарядке и снижению тепловой нагрузки на аккумуляторную батарею. Это основная причина почти повсеместного перехода на бесщеточные двигатели в беспроводных электроинструментах, электромобилях, дронах и системах отопления, вентиляции и кондиционирования воздуха за последние два десятилетия.
Несмотря на преимущества бесщеточных конструкций, коллекторные двигатели постоянного тока остаются правильным выбором в нескольких категориях приложений.
Привод двигателя постоянного тока (также называемый приводом постоянного тока или контроллером постоянного тока) — это пакет силовой электроники, который регулирует напряжение и ток, подаваемые на двигатель постоянного тока, для управления его скоростью, крутящим моментом, ускорением и направлением. Двигатель и привод вместе образуют полноценную систему управления движением: двигатель обеспечивает механическую выходную мощность, а привод управляет электрическим входом для достижения желаемого профиля движения.
Традиционные коллекторные приводы постоянного тока используют методы тиристорного (SCR) фазового управления или ШИМ (широтно-импульсной модуляции) для регулирования напряжения якоря. Четырехквадрантный привод может контролировать скорость и крутящий момент в обоих направлениях вращения, обеспечивая рекуперативное торможение, при котором двигатель действует как генератор во время замедления, возвращая энергию в шину питания. Эта возможность широко используется в промышленных приложениях, таких как намоточные машины, прокатные станы и подъемники, где важны контролируемое замедление и рекуперация энергии.
Точность регулирования скорости коллекторного привода постоянного тока с замкнутым контуром и сигналом обратной связи тахометра обычно составляет ±0,1% от заданной скорости , что объясняет их долгое доминирование в точном промышленном управлении движением до того, как в 1990-х годах появились преобразователи частоты переменного тока.
Контроллер двигателя BLDC выполняет электронную коммутацию, считывая положение ротора — с помощью датчиков Холла, встроенных в двигатель, или посредством бездатчиковой оценки противоЭДС — и переключая ток через фазы статора в правильной последовательности. Контроллер также управляет рабочим циклом ШИМ для регулирования скорости и контролирует ток для ограничения крутящего момента. Более сложные приводы BLDC реализуют управление по полю (FOC), которое оптимизирует угол между полем статора и магнитом ротора для достижения максимального крутящего момента на ампер во всем диапазоне скоростей.
В интегрированных системах движения, таких как шарниры роботов, сервооси и шпиндели с ЧПУ, двигатель BLDC и его привод обычно соединяются и настраиваются как согласованный комплект. Параметры привода, включая полосу пропускания контура тока, коэффициент усиления контура скорости и время коммутации, настраиваются во время ввода в эксплуатацию и сохраняются в энергонезависимой памяти привода.
Область применения коллекторных и бесщеточных двигателей постоянного тока отражает их сильные стороны в стоимости, обслуживании, диапазоне скоростей и точности управления.
1. Введение: деконструкция мощности асинхронного двигателя переменного тока. Асинхронный двигатель переменного тока является одним из м...
ЧИТАТЬ ДАЛЬШЕ1. Введение В современной промышленной автоматизации, строительстве центров обработки данных, модернизации бытовой электроники...
ЧИТАТЬ ДАЛЬШЕШаговые двигатели представляют собой краеугольный камень современного управления движением, обеспечивая точное позиционирование и корректировку...
ЧИТАТЬ ДАЛЬШЕПромышленный автомобильный ландшафт претерпевает значительную трансформацию, вызванную неустанным...
ЧИТАТЬ ДАЛЬШЕСопутствующие товары
Здание 10, № 199, Jinfeng Road, Сучжоу Хай-тек, провинция Цзянсу, Китай
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Авторское право © Сучжоу Retek Electric Technology Co., Ltd. Все права защищены. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













